RDK Resources
[*RDK Preferred*]
Code Management Facility
RDK Forums
[RDK Conferences]
RDK Support
Archives
Papers & Presentations Archive![]()
Papers & Presentations Archive![]()
The RDKC Media Server is much more than a multi-format, multi-protocol server that delivers your media rich content across multiple screens and platforms. The RDK camera software runs on RPi-0/RPI-3 device. With this RTSP streaming we can able to play live streaming content in VLC player. This page dedicated to bringing up and validation of RMS functionality with RTSP streaming in RPI-0/RPI-3.
Refer below link to build camera image
Morty:
RDK-C Build Instruction for RPI-0
RDK-C Build Instruction for RPI-3
Dunfell:
RDK-C rdk-next Yocto 3.1 dunfell build for Raspberrypi
STEP 1:
Add require SSID and PSK in /etc/wpa_supplicant.conf file in below format
network={
ssid="username"
psk="password"
}
ctrl_interface=/var/run/wpa_supplicant
ctrl_interface_group=0
update_config=1
network={
ssid="XXXX"
psk="YYYYYYYYY"
}
STEP 2:
Add below configuration in end of the /boot/config.txt file
dtoverlay=imx219
core_freq_min=250
vi /boot/config.txt dtoverlay=imx219 core_freq_min=250
STEP 3:
Disable dtoverlay and minimum freq configuration in config.txt file
vi /boot/config.txt #dtoverlay=imx219 #core_freq_min=250
Run mediastreamer binary with v4l2src configuration.
vi /lib/rdk/startMST.sh #Run mediastreamer binary in background # 1. To validate streaming with v4l2 need to give "mediastreamer v4l2src &" # 2. To validate streaming with libcamera need to give "mediastreamer libcamerasrc &" # If we change 1 and 2, need to reboot the target and validate streaming. mediastreamer v4l2src &
2. RMS with RTSP validation using libcamera
Enable dtoverlay and minimum freq configuration in config.txt file
vi /boot/config.txt dtoverlay=imx219 core_freq_min=250
Run mediastreamer binary with libcamerasrc configuration.
vi /lib/rdk/startMST.sh #Run mediastreamer binary in background # 1. To validate streaming with v4l2 need to give "mediastreamer v4l2src &" # 2. To validate streaming with libcamera need to give "mediastreamer libcamerasrc &" # If we change 1 and 2, need to reboot the target and validate streaming. mediastreamer libcamerasrc &
STEP 4:
Reboot the Target
After Reboot don't do step 1 and 2.
Note : Step 1 & 2 is only applicable for fresh target boot-up with new image.
STEP 5:
Modify needed resolution in rms configuration file
Supported Resolution:
SD:
Width - 640 , Height - 480
Width - 720 , Height - 576
HD:
Width - 1280 , Height - 720
FULL HD :
Width - 1920 , Height - 1080
Modify resolution in below configuration file
cd /usr/local/rms/bin
vi rms.conf
RRSIP=XXX.XXX.XXX.XXX RRSPORT=81 ROOMID=rpi0 RRSSSL=0 WIDTH=1280 HEIGHT=72
After resolution modification need to reboot the target.
Note: This step is not necessary,it is depends on your resolution validation.
STEP 6:
WiFi connection is must needed for RMS validation.
Check WiFi connection by using below command.
ifconfig
root@raspberrypi3-rdk-camera:~# ifconfig
eth0 Link encap:Ethernet HWaddr B8:27:EB:87:67:91
UP BROADCAST MULTICAST MTU:1500 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:89842 errors:0 dropped:0 overruns:0 frame:0
TX packets:89842 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:25639748 (24.4 MiB) TX bytes:25639748 (24.4 MiB)
wlan0 Link encap:Ethernet HWaddr B8:27:EB:D2:32:C4
inet addr:192.168.43.146 Bcast:192.168.43.255 Mask:255.255.255.0
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:44 errors:0 dropped:0 overruns:0 frame:0
TX packets:103 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:4484 (4.3 KiB) TX bytes:10216 (9.9 KiB)
STEP 7:
check loaded module by using below command
lsmod
root@raspberrypi3-rdk-camera:~# lsmod Module Size Used by bcm2835_v4l2 40563 0 v4l2_common 4809 1 bcm2835_v4l2 videobuf2_vmalloc 6264 1 bcm2835_v4l2 videobuf2_memops 1528 1 videobuf2_vmalloc videobuf2_v4l2 12640 1 bcm2835_v4l2 videobuf2_core 27389 2 bcm2835_v4l2,videobuf2_v4l2 videodev 154457 4 v4l2_common,videobuf2_core,bcm2835_v4l2,videobuf2_v4l2 media 23307 1 videodev brcmfmac 258239 0 brcmutil 7590 1 brcmfmac snd_bcm2835 21405 0 cfg80211 492836 1 brcmfmac snd_pcm 79872 1 snd_bcm2835 rfkill 19936 3 cfg80211 snd_timer 20294 1 snd_pcm snd 52949 3 snd_timer,snd_bcm2835,snd_pcm lirc_rpi 6840 0 lirc_dev 7533 1 lirc_rpi uio_pdrv_genirq 3469 0 uio 8703 1 uio_pdrv_genirq fixed 2876 0 sch_fq_codel 9662 2 ipv6 384101 18
STEP 8:
check camera device there or not by using below command
ls /dev/video0
root@raspberrypi0-rdk-camera:~# ls /dev/video0 /dev/video0
STEP 9:
Need to stop below service file to validate gstreamer based live streaming
systemctl stop rms-launcher.service
systemctl stop pipewire-launcher.service
systemctl stop mst-launcher.service
Need to do below changes in config.lua file
vi /usr/local/rms/config/config.lua
-
+ ]]--
-- RTSP
{
- ip="127.0.0.1",
+ ip="0.0.0.0",
port=5544,
protocol="inboundRtsp",
},
-
+ --[[
After stoping those service file, then we need to start/trigger below service and binaries.
root@raspberrypi3-rdk-camera:~# systemctl start mst-launcher
To start RMS binary , We need to go cd /usr/local/rms/bin directory
root@raspberrypi3-rdk-camera:~# cd /usr/local/rms/bin/ root@raspberrypi3-rdk-camera:/usr/local/rms/bin# ./rdkcmediaserver ../config/config.lua &
Need to check mediastreamer and RMS running status with below command
root@raspberrypi3-rdk-camera:~# ps -Af | grep media root 2396 1 1 15:30 ? 00:00:00 mediastreamer v4l2src root 2555 1613 30 15:31 pts/0 00:00:01 ./rdkcmediaserver ../config/config.lua root 2574 1613 0 15:31 pts/0 00:00:00 grep media
STEP 10:
Enter into the Telnet console with telnet command
telnet localhost 1222
root@raspberrypi3-rdk-camera:~# telnet localhost 1222 Trying ::1... Trying 127.0.0.1... Connected to localhost. Escape character is '^]'.
After entering the telnet console need to stop webrtc streaming, so we should check webrtc status with "listconfig" command.
listconfig
Command entered successfully!
Run-time configuration
dash: []
hds: []
hls: []
metalistener: []
mss: []
process: []
pull:
--
configId: 1
localStreamName: stream2
status:
current:
description: Streaming
uniqueStreamId: 1
uri: sercom://0
push: []
record: []
webrtc:
--
configId: 2
roomid: rpi0
rrsip: 18.224.54.11
rrsport: 81
If the webrtc detail is available in listconfig, we need to stop webrtc with "stopwebrtc" command
stopwebrtc Command entered successfully! Stopped WebRTC Negotiation Service
After did the stopwebrtc, check the listconfig
listconfig
Command entered successfully!
Run-time configuration
dash: []
hds: []
hls: []
metalistener: []
mss: []
process: []
pull:
--
configId: 1
localStreamName: stream2
status:
current:
description: Streaming
uniqueStreamId: 1
uri: sercom://0
push: []
record: []
webrtc: []
STEP 11:
At that same telnet console,need to give the below command for RTSP streaming
pushStream uri=rtsp://camera_ip:5544 localStreamName=stream2
Example:
pushStream uri=rtsp://192.168.43.146:5544 localStreamName=stream2
pushStream uri=rtsp://192.168.43.146:5544 localStreamName=stream2
Command entered successfully!
Local stream stream2 enqueued for pushing to rtsp://192.168.43.146:5544 as stream2
configId: 4
forceTcp: false
keepAlive: true
localStreamName: stream2
targetStreamName: stream2
targetStreamType: live
targetUri:
fullUri: rtsp://192.168.43.146:5544
port: 5544
scheme: rtsp
STEP 12:
On VLC player, for RTSP streaming
need to enter media → Open Network Stream option and then give rtsp URL to play streaming content in VLC
Example :rtsp://192.168.43.146:5544/stream2
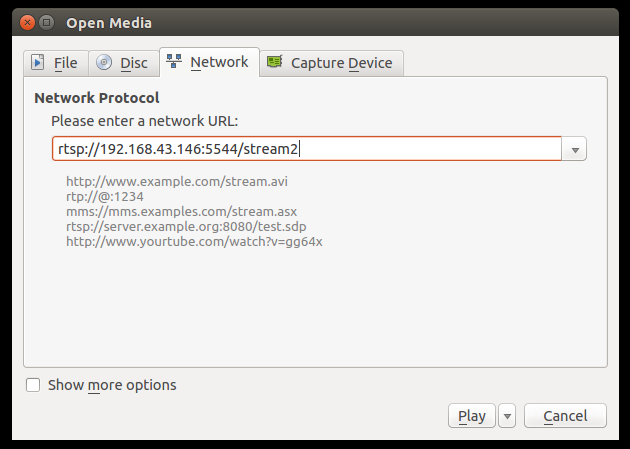
We can able to see the live streaming content on VLC Player.
Note: VLC player available PC and RPI target should run in same network.

1 Comment
Z-Chi-Hsuan Huang
Hi, I am a new in RDK-C. I have some problem when I run RMS.
I just run mediastreamer and rdkcmediaserver as the step.
After about 20 seconds it will trigger stopstream.
I have traced the code. It looks like my protocol became dead and be cleaned.
I use the origin code from Dunfell, only change the h264enc for my platform. Is there something wrong with my config?